드론 Drone 비행 원리
2023. 4. 18. 15:41ㆍ드론(무인비행장치)
반응형

쿼드로터 드론 비행원리
아래 그림 드론은 우리가 흔히 볼수 있는 날개(프로펠러)가 4개인 쿼드로터 드론 입니다.
프로펠러가 마주보는 2쌍씩(대각선) 같은 방향으로 회전하고 프로펠러의 회전 방향과 반대로 돌아가는 힘이 동체에 작용해야 중력을 이기고 하늘로 떠오르며, 회전 속도만으로 방향을 바꿔서 비행을 자유 자재로 합니다.
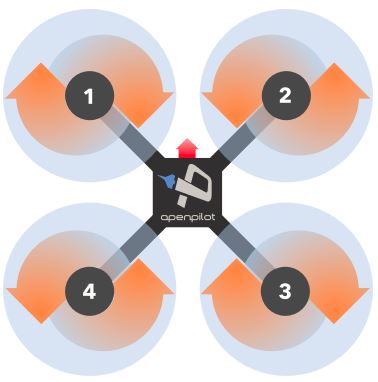
쿼드로터 드론 프로펠러 방향
위 그림 쿼드로터기준으로 1번3번 프로펠러 - 시계방향 clockwise (CW),
2번4번 프로펠러 - 반시계방향 counterclockwise (CCW) 이며,
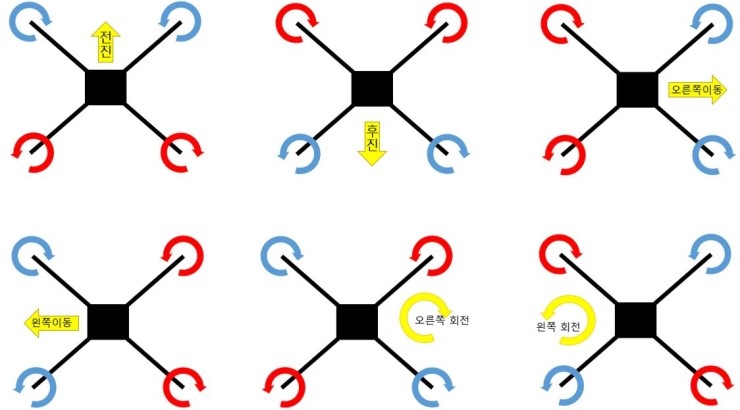
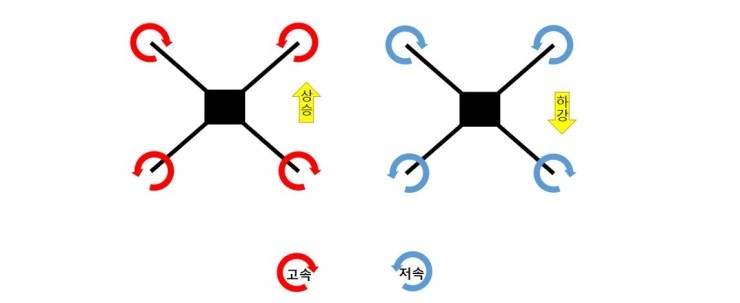
4개의 프로펠러가 고속으로 회전하면 제자리에서 상승하고 저속으로 회전하면 하강을하며, 진행하고자 하는 방향의 프로펠러의 회전 속도를 줄이면 기체가 그 방향으로 기울어지면서 기울어진 방향으로 이동을 합니다.
기체 방향 전환시 프로펠러 회전 속도 변화
( 빨간색 프로펠러 표시는 고속회전)
반응형
'드론(무인비행장치)' 카테고리의 다른 글
| 드론 Drone 프로펠러 방향과 체결 방법 (0) | 2023.05.09 |
|---|---|
| 드론 Drone 용어 정리 (0) | 2023.04.18 |
| 드론 Drone 이란? (0) | 2023.04.18 |